Table of Contents >> Show >> Hide
- Why This Underwater Soft Robot Matters
- What “Stays In Shape” Really Means
- Meet the Brittle-Star-Inspired Robot Behind the Buzz
- Why Engineers Borrowed a Body Plan From a Brittle Star
- Why Crawling Underwater Can Beat Swimming
- The Real Engineering Challenge: Control
- Underwater Soft Robotics Is Bigger Than One Robot
- Where These Robots Could Go Next
- Experiences From the Tank, the Lab, and the Seafloor Mindset
- SEO Tags
Most people hear the word robot and imagine a stiff machine full of gears, bolts, and enough sharp corners to make a coffee table nervous. Soft robots are the opposite. They bend, flex, squish, and recover. And underwater, that soft-and-springy personality is not a bug. It is the feature. That is exactly why the idea behind an underwater crawling soft robot is so exciting. Instead of charging through the ocean like a tiny submarine with attitude problems, this kind of robot can move gently along the seafloor, adapt to rough terrain, and interact more safely with delicate environments.
One of the most memorable examples is a brittle-star-inspired machine called PATRICK, an untethered underwater soft robot designed to crawl rather than swim. It is a clever little reminder that nature has already spent a few hundred million years solving motion problems, and engineers are finally humble enough to take notes. Inspired by the flexible limbs of brittle stars, this robot combines soft materials, onboard systems, and motion planning to keep moving in a useful way without turning into a rubbery mess. In plain English, it stays in shape where it counts.
That phrase, stays in shape, is the real hook here. A soft robot does not need to be rigid like a pipe wrench in order to be effective. It needs to preserve enough structure to push, pull, crawl, and respond to the underwater world without collapsing into noodle mode. That balance between flexibility and control is what makes underwater soft robotics one of the most interesting corners of modern engineering.
Why This Underwater Soft Robot Matters
The ocean is not an easy workplace. It is dark, cold, wet, unpredictable, and full of surfaces that would happily scratch, trap, or confuse a traditional machine. Rigid underwater robots are excellent for many jobs, especially long-range surveying and high-speed travel, but they can struggle when the mission calls for close contact with fragile organisms, uneven ground, or cluttered natural terrain.
An underwater crawling soft robot offers a different style of movement. Instead of hovering and thrusting like a mini torpedo, it can inch along the bottom, absorb bumps, squeeze around obstacles, and distribute contact more gently. That makes it especially promising for inspection, ecological monitoring, sampling, and exploration in places where brute force is a bad personality trait.
The appeal goes beyond “look, a cute starfish robot.” Soft robots are naturally better suited to uncertain contact. If a leg hits a rock, a shell, or a ridge of sand, compliance can prevent damage and help the machine adapt. In the ocean, that kind of grace matters. One clumsy shove from a rigid system can disturb sediment, stress marine life, or throw the robot off balance. A softer crawler has a better shot at moving like a polite guest instead of a door-to-door salesperson with jet thrusters.
What “Stays In Shape” Really Means
Soft Does Not Mean Floppy
It is easy to assume that a soft robot is basically a pool noodle with ambition. Not quite. The best designs use softness selectively. Engineers combine flexible materials with structural reinforcement, clever geometry, and controlled actuation so the robot can deform when needed without losing its useful form. In other words, the robot can bend, but it still remembers how to be a robot.
For a crawling machine underwater, staying in shape means maintaining leg geometry, preserving traction, and producing repeatable motion. If every push deforms the body in a random direction, the robot goes nowhere fast. If the robot is too stiff, it loses the advantages of softness. The sweet spot is a body that yields to the environment while still directing force where it matters.
That is why many successful underwater soft robots are not purely soft in every single component. They are often hybrids. Some use soft limbs with strategic reinforcement. Others use rigid supports with compliant outer structures. This is not cheating. It is engineering. Nature does it too. Plenty of animals are flexible without being boneless puddles of indecision.
Shape Is Also About Motion Quality
“Staying in shape” is also about keeping a stable movement pattern. Underwater locomotion is tricky because water pushes back in weird ways, the seafloor changes constantly, and soft materials can behave nonlinearly. A well-designed crawler has to maintain useful posture, timing, and contact points over repeated steps. That is harder than it sounds. Even people trip over flat ground, and humans at least get to complain about it afterward.
So when a soft robot reliably crawls toward a goal underwater, that is not just a neat demo. It is evidence that the machine can preserve enough structure and control to perform meaningful work. That is a major milestone for the field.
Meet the Brittle-Star-Inspired Robot Behind the Buzz
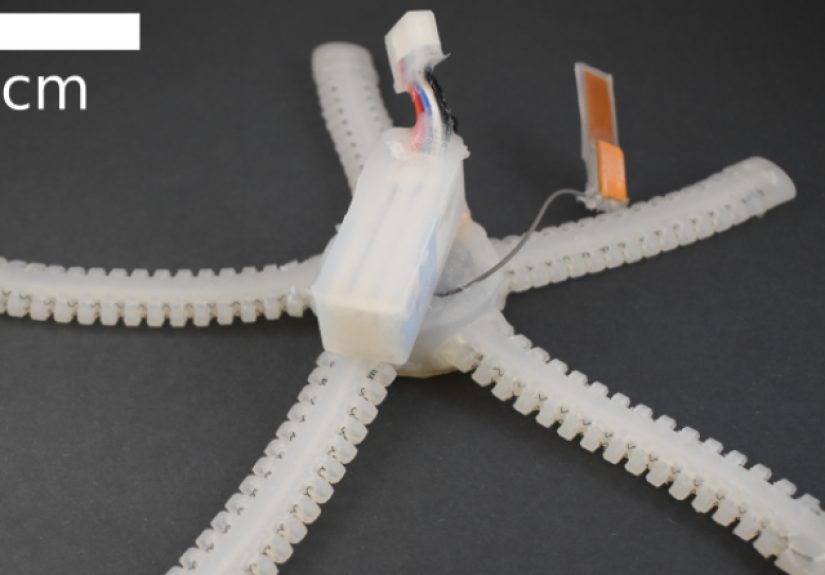
The robot most closely associated with this topic is PATRICK, developed by researchers at Carnegie Mellon University. Its design is inspired by the brittle star, a marine relative of the starfish known for flexible arms and surprisingly capable locomotion. Brittle stars are not built like sleek fish or muscular crabs. They are more like living proofs that unusual body plans can still get the job done.
PATRICK follows that same playbook. It uses five flexible legs and a total of 20 shape-memory alloy wires to create a rich range of possible motions. Shape-memory alloy, often a nickel-titanium material, is famous for changing shape when heated. That gives engineers a compact way to drive movement inside soft structures. The result is a robot that can bend its limbs, generate crawling motions, and do so in an untethered underwater setup.
That untethered detail matters. Tethers are useful, but they also limit mobility, add drag, and turn every experiment into a tangled friendship bracelet. By placing power and electronics onboard, the Carnegie Mellon team pushed the robot closer to real-world usefulness. They also paired the machine with closed-loop locomotion planning, meaning the robot was not just flailing artistically. It could use motion primitives and feedback to move toward a goal.
This is where the headline earns its paycheck. The robot is soft enough to deform, but structured enough to crawl purposefully. It keeps its performance shape even in a medium that loves to expose weak design choices.
Why Engineers Borrowed a Body Plan From a Brittle Star
Biomimicry in robotics often focuses on obvious celebrities: fish, octopuses, snakes, insects. Brittle stars are less famous, which is a shame because they are wonderfully weird. Their long, slender arms allow them to navigate the seabed with flexible, distributed movement. They do not rely on one big propulsive blast. They coordinate multiple limbs in ways that are stable, adaptable, and well suited to complex terrain.
That makes them great role models for underwater crawling robots. A brittle-star-like body offers several advantages. First, multiple limbs create redundancy. If one limb is less effective on a particular surface, others can compensate. Second, the radial arrangement gives the robot lots of directional options. Third, the flexible appendages help with contact-rich motion, where the environment is part of the locomotion equation rather than just scenery.
The genius of this approach is that it trades elegance for resilience. A brittle star is not trying to win a speedboat race. It is trying to keep moving through a messy world. For seafloor robots, that is often the smarter goal.
Why Crawling Underwater Can Beat Swimming
Swimming gets most of the publicity because it looks dramatic and makes for better slow-motion video. But crawling is often more practical near the bottom. A crawling robot can move deliberately over sediment, rocks, reef structures, and other uneven terrain without constantly fighting to maintain depth and orientation. It can also remain close to an object or habitat for detailed inspection.
Imagine missions such as checking submerged infrastructure, inspecting aquaculture systems, observing benthic ecosystems, or collecting data in fragile habitats. In these cases, speed is not everything. Stability, low disturbance, and careful contact matter more. A soft crawler can potentially handle these tasks with less environmental disruption than a rigid vehicle thrashing nearby with propellers.
There is another advantage: energy can sometimes be spent more strategically. Swimming continuously often demands constant propulsion. Crawling can use intermittent contact and leverage. That does not make it easy, but it changes the engineering trade-offs in useful ways.
Of course, underwater crawling is no free lunch. Traction is still hard, terrain can be slippery, and the robot must manage drag, buoyancy, and deformation all at once. But when the job is local, careful, and terrain-aware, crawling becomes a very attractive option.
The Real Engineering Challenge: Control
Soft robotics has a reputation for being brilliant in concept and annoying in practice. That reputation is earned. A soft robot has many possible deformations, and underwater motion adds even more complexity because the surrounding fluid changes how the body moves. This means modeling, planning, and control can become computational headaches with extra side effects.
Traditional rigid robots are easier to predict because their joints and links behave in more constrained ways. Soft robots are more like mechanical improv performers. They can do interesting things, but they are not always easy to direct. Engineers therefore spend a lot of effort creating reduced models, motion primitives, feedback systems, and hybrid structures that make the machine more controllable.
PATRICK’s importance is partly about proving that closed-loop underwater locomotion planning is possible on a soft crawling platform. That is huge. It means the robot is not just reacting randomly; it is following a controllable strategy. Broader work in the field also shows that researchers are finding other routes to stability, including reinforced soft actuators, hydraulic systems, differentiable simulation, modular architectures, and more advanced sensing.
In short, the future of underwater soft robots will not be won by softness alone. It will be won by softness plus control. Squishy is charming, but squishy and purposeful is where the money is.
Underwater Soft Robotics Is Bigger Than One Robot
PATRICK is a standout example, but it sits inside a much larger movement. Researchers at MIT have demonstrated soft robotic fish that can swim in three dimensions and maneuver around marine life more naturally than traditional underwater vehicles. Harvard’s Wyss Institute and collaborators have developed soft grippers and manipulators for deep-sea exploration, allowing scientists to interact with delicate creatures that would not appreciate being grabbed by a mechanical claw that feels like a garage tool.
Other teams are exploring soft aquatic materials powered by magnetic fields, modular deformable aquabots built from repeatable lattice elements, underwater soft robots controlled through advanced modeling, and even soft ring-shaped crawlers that can move in air or underwater under specific conditions. The field is expanding in every direction at once: movement, sensing, manipulation, structure, and autonomy.
That is why the phrase underwater crawling soft robot stays in shape resonates beyond a single lab demo. It captures a central challenge for the whole field. Researchers want machines that are compliant enough to interact gently, but structured enough to move efficiently and predictably. They want robots that adapt without becoming unstable, and protect fragile environments without becoming uselessly floppy.
The best recent work suggests this balance is increasingly possible. Some systems use soft bodies for safe interaction. Others blend hard and soft elements for better load-bearing. Still others rethink the architecture entirely, using modular pieces or novel actuation strategies. There is no single winning formula yet, which makes the field exciting and slightly chaotic in the best possible way.
Where These Robots Could Go Next
The future of underwater soft robots looks less like a single superhero machine and more like a team of specialists. Some will crawl. Some will swim. Some will anchor, grasp, inspect, or collect samples. The most useful systems may combine multiple modes, shifting between locomotion styles as the environment changes.
Expect progress in a few key areas. First, actuation will improve. Researchers are already experimenting with shape-memory alloys, hydraulic drives, electrohydraulic systems, magnetic actuation, and hybrid mechanisms. Second, control will get smarter through better simulation, machine learning, and onboard sensing. Third, materials and structures will become more purposeful, with designers tuning stiffness, compliance, and shape retention for specific missions.
There is also a strong case for environmentally sensitive robotics. As marine science, offshore infrastructure, and conservation work become more demanding, the need for robots that can move carefully in delicate settings will only grow. A soft underwater crawler is not just a science fair flex. It could become a practical tool for places where sensitivity matters as much as strength.
So yes, the robot stays in shape. But more importantly, the field itself is taking shape. And it is starting to look less like a gimmick and more like the future of underwater interaction.
Experiences From the Tank, the Lab, and the Seafloor Mindset
One of the most revealing experiences related to underwater soft robotics is how quickly elegant theory meets stubborn reality. In a controlled sketch or simulation, a crawling robot looks beautifully logical: bend limb, plant contact, shift body, repeat. In a tank, things get more entertaining. A tiny change in buoyancy can make a leg land softer than expected. A current from a nearby pump can nudge the body off course. A surface that looked smooth can suddenly behave like sandpaper in one direction and butter in another. Engineers working on these systems learn fast that underwater locomotion is less like driving on a road and more like trying to walk across a trampoline while someone gently sprays you with a hose.
Another common experience is discovering that softness is both a blessing and a prank. Soft limbs are forgiving when the robot bumps into obstacles, but they can also absorb energy that you wanted to turn into forward motion. That means researchers spend a surprising amount of time tuning details that sound small until they wreck a prototype: wall thickness, reinforcement placement, wire routing, actuation timing, cooling rates, and limb curvature. In many underwater soft-robot projects, the real progress comes from these unglamorous improvements. The glamorous part is the video. The progress is usually hidden in version seven of a limb nobody outside the lab will ever meet.
Field-oriented testing also changes how people think about success. In a traditional robotics demo, speed often steals the spotlight. With underwater crawling soft robots, a slower and steadier movement can be more impressive. If the machine can approach a target without stirring up sediment, keep traction on uneven terrain, and recover after mild contact, that is a meaningful achievement. Researchers and marine technologists often come away from these experiments with a deeper respect for slow intelligence. The robot does not need to look dramatic. It needs to behave reliably where the environment is doing its best to be annoying.
There is also a very human lesson in watching bio-inspired robots work underwater: animals make hard problems look disrespectfully easy. A brittle star, fish, or octopus does not publish a paper before moving across the seafloor. It just does it. That contrast pushes engineers to look more carefully at body mechanics, distributed control, and the relationship between structure and environment. Many teams working in soft robotics describe a shift in mindset from commanding every motion to shaping conditions for good motion to emerge. That is a subtle but important difference. Instead of forcing the robot to act like a rigid machine in a wet world, they let the material and morphology do part of the work.
Perhaps the most valuable experience of all is realizing that underwater soft robotics is not merely about making robots softer. It is about making them better matched to the world they enter. The ocean is not a factory floor. It is irregular, delicate, dynamic, and occasionally rude. A robot that can crawl, flex, recover, and keep enough shape to stay useful is not just technically impressive. It feels appropriate. That is why this line of research keeps attracting attention. It promises machines that do not just survive underwater, but belong there a little more naturally. And in robotics, that is often when progress stops feeling mechanical and starts feeling genuinely smart.





