Table of Contents >> Show >> Hide
- What Are Esoteric Actuators?
- Why Engineers Bother With the Weird Stuff
- The Main Families of Esoteric Actuators
- 1. Piezoelectric Actuators: Tiny Motion, Big Attitude
- 2. Shape Memory Alloy Actuators: The Metal That Remembers
- 3. Electroactive Polymer Actuators: Artificial Muscles With Better Branding
- 4. Soft Pneumatic and Vacuum Actuators: Gentle Giants of Robotics
- 5. HASEL and Electrohydraulic Actuators: Where Soft Robotics Gets Fancy
- 6. Magnetostrictive Actuators: Small Stroke, Serious Force
- 7. MEMS Electrostatic and Electrothermal Actuators: Motion at the Microscopic Scale
- 8. Optical and Photo-Driven Microactuators: Motion From Light
- How to Choose the Right Esoteric Actuator
- Real-World Applications of Esoteric Actuators
- The Biggest Challenges Holding Them Back
- The Future of Esoteric Actuators
- Experiences Related to Esoteric Actuators
- Conclusion
- SEO Tags
Note: This is body-ready HTML only, written for direct web publishing in standard American English.
Most people hear the word actuator and picture something sturdy, practical, and about as glamorous as a filing cabinet. A motor spins. A piston pushes. A valve opens. End of story. But step into advanced robotics, aerospace, medical devices, precision optics, or microengineering, and the actuator family tree gets delightfully weird. Suddenly, motion comes from ceramic crystals, memory metals, electrically active polymers, magnetic domains, microscopic structures, or soft air-filled chambers that look suspiciously like science fair snacks.
That oddball corner of engineering is where esoteric actuators live. These are the motion-making devices that do not fit the usual “motor plus gearbox” formula. They are often smaller, smarter, lighter, softer, faster, quieter, or stranger than conventional systems. They can bend a mirror by a tiny fraction of a human hair, curl a robotic finger without rigid joints, or change an aircraft surface without the usual mess of hydraulics and heavy linkages.
In plain English, esoteric actuators are the engineering world’s specialty tools. You may not use one to raise your garage door, but you absolutely might trust one to steer a surgical device, stabilize a telescope, tune a precision stage, or help a soft robot grip a strawberry without turning it into jam. The technology is real, the use cases are growing, and the trade-offs are spicy.
What Are Esoteric Actuators?
An actuator is any device that converts energy into motion. Traditional actuators usually rely on electric motors, hydraulic cylinders, or pneumatic pistons. Esoteric actuators do the same basic job, but with less familiar physics. Instead of rotating shafts and chunky mechanics, they may use electric fields, phase changes, magnetic strain, thermal expansion, or flexible materials that deform like muscle.
The word “esoteric” does not mean imaginary. It simply means specialized. These actuators tend to show up when standard hardware cannot meet the design brief. Maybe the motion must be incredibly precise. Maybe the system has to fit in a microscopic package. Maybe it must operate safely around humans, inside an MRI machine, or on a lightweight flying structure where every gram matters.
Why Engineers Bother With the Weird Stuff
If motors are so useful, why go looking for exotic alternatives? Because conventional actuators come with baggage: weight, backlash, noise, friction, size, rigid mechanisms, maintenance needs, and sometimes enough hardware to make a minimalist engineer cry into their coffee.
Esoteric actuators are attractive because they can offer one or more of the following:
- Ultra-precise motion for nanometer- and micrometer-scale positioning
- High force in a tiny package for specialty mechanisms
- Compliance and softness for safer human interaction
- Low weight for aerospace and wearables
- Few moving parts for compact, elegant designs
- Micro-scale integration for sensors, scanners, and lab-on-chip systems
- Operation in unusual environments such as strong magnetic fields or tightly constrained spaces
Of course, every engineering love story has complications. Esoteric actuators may demand high voltage, careful control, special materials, thermal management, or manufacturing methods that are not exactly available in aisle seven at the local hardware store.
The Main Families of Esoteric Actuators
1. Piezoelectric Actuators: Tiny Motion, Big Attitude
Piezoelectric actuators use materials that deform when an electric field is applied. Their motion is usually very small, but what they lack in stroke they make up for in speed, precision, stiffness, and force density. These actuators are stars in precision engineering because they can generate highly controlled movement with almost absurd repeatability.
This makes them ideal for nanopositioning stages, optics, vibration control, fuel injection, biomedical devices, and microdispensing systems. Flexible piezoelectric composites have also been developed for vibration suppression and shape control in aerospace structures. If an engineer needs something to move a little, but move that little bit brilliantly, piezo is often invited to the meeting.
The catch is stroke length. A bare piezo stack usually moves only a tiny distance, so designers often add flexures or amplification mechanisms. Piezo systems can also show hysteresis and creep, which means the motion is not always perfectly linear unless the control strategy is smart enough to babysit it.
2. Shape Memory Alloy Actuators: The Metal That Remembers
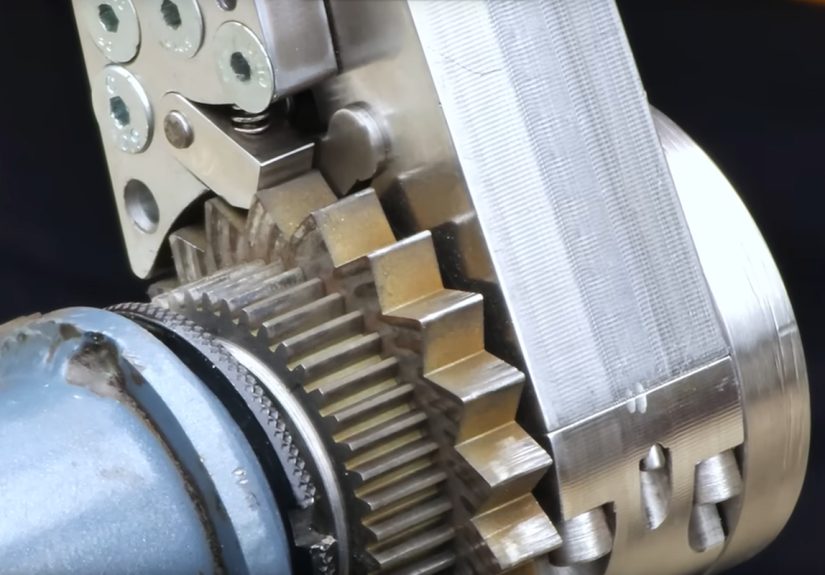
Shape memory alloys, commonly based on nickel-titanium, are the drama queens of motion systems. Heat them, and they “remember” a trained shape. Cool them, and they can be deformed again. That phase change allows the alloy to generate useful motion and force without gears, pistons, or bulky transmissions.
The big selling points are compactness, simplicity, and impressive force for the weight. Aerospace designers like them for morphing surfaces, deployable structures, compact rotary devices, and other situations where traditional actuators eat too much mass and space. Some NASA designs even use nested SMA tubes and geared arrangements to create more capable rotary systems than earlier one-way heating-and-cooling approaches.
The downside is that SMAs are usually thermally driven, which means they are not always fast. They also show hysteresis, temperature sensitivity, and fatigue concerns over repeated cycling. In other words, they are wonderfully elegant until someone asks for millisecond response, perfect linearity, and no thermal lag. Then the room gets awkward.
3. Electroactive Polymer Actuators: Artificial Muscles With Better Branding
Electroactive polymers, or EAPs, are materials that change shape when electrically stimulated. They are often described as artificial muscles because they can produce large strains, soft motion, tunable stiffness, and a useful power-to-weight ratio. Unlike rigid actuators, EAPs can be compliant and back-drivable, which is valuable in haptics, wearables, medical tools, and soft robotics.
One of the most interesting things about EAPs is how naturally they fit human-centered systems. In haptic devices and MRI-adjacent tools, their compliance can be a genuine advantage. Some EAP concepts are also attractive where magnetic compatibility matters, because they can operate without the sort of bulky metallic motor system that makes MRI engineers sigh heavily.
Still, EAPs are not magic noodles. Many require high voltages, careful electrode design, or controlled operating conditions. Performance can also vary significantly depending on whether the polymer is dielectric, ionic, or conducting. The family is promising, but it is not a one-size-fits-all replacement for conventional drives.
4. Soft Pneumatic and Vacuum Actuators: Gentle Giants of Robotics
Soft robotics introduced a very different motion philosophy: instead of forcing the world to fit the machine, make the machine flexible enough to fit the world. Soft pneumatic actuators use pressurized air to bend, twist, extend, or grip. Vacuum-powered actuators use negative pressure to contract or reshape soft structures in muscle-like ways.
These actuators are excellent for delicate manipulation. They can grab fruit, handle fragile lab samples, adapt to irregular shapes, and interact more safely with humans than rigid industrial systems. They also look wonderfully alive, which is either inspiring or mildly unsettling depending on your caffeine level.
The main limitations are system-level ones. Soft actuators often depend on pumps, valves, tubing, and control hardware that can become bulky. So while the actuator itself may look elegant, the surrounding machinery can resemble a backstage production crew frantically making the magic happen.
5. HASEL and Electrohydraulic Actuators: Where Soft Robotics Gets Fancy
HASEL actuators, short for hydraulically amplified self-healing electrostatic actuators, are among the most interesting newer entries in the field. They combine features of electrostatic actuation and fluid-driven deformation by using flexible pouches and dielectric liquids. When voltage is applied, the fluid redistributes, producing motion that can look surprisingly muscle-like.
Why do engineers care? Because HASEL-style systems aim to bridge an annoying gap. Traditional soft pneumatic actuators are compliant but often tethered to external pumps. Conventional electric motors are compact but rigid. Electrohydraulic approaches try to deliver a better mix of speed, force, compliance, and compactness. That has obvious appeal for prosthetic hands, wearable devices, biomimetic machines, and future soft manipulators.
The technology is exciting, but it also asks for serious respect in design. High-voltage driving electronics, material durability, packaging, and consistent long-term performance are all part of the puzzle.
6. Magnetostrictive Actuators: Small Stroke, Serious Force
Magnetostrictive actuators use materials that change shape in a magnetic field. The motion is usually tiny, but the response can be extremely fast, and the generated loads can be impressive. These systems are attractive in valves, vibration control, precision mechanisms, and specialty aerospace hardware.
The phrase “small stroke” matters here. Even giant magnetostrictive materials do not move very far in raw form, so practical designs often rely on clever mechanical amplification or use cases where only short travel is required. Think of them as engineering sprinters: quick, intense, and not especially interested in taking the scenic route.
7. MEMS Electrostatic and Electrothermal Actuators: Motion at the Microscopic Scale
At the micro scale, actuators become a completely different species. MEMS actuators are built using fabrication methods similar to integrated circuits, which allows motion systems to be made at tiny scales and integrated with electronics. These are crucial in sensing, timing, signal processing, optical scanning, switching, and biomedical devices.
Two major MEMS actuation approaches are electrostatic and electrothermal. Electrostatic designs usually offer wider bandwidth and good energy efficiency, while electrothermal designs can generate useful force from a smaller footprint and with CMOS-friendly driving conditions. The trade-off is heat, power consumption, and response behavior.
MEMS actuators are esoteric mostly because they live in a world where micrometers matter, packaging is everything, and a minor fabrication detail can determine whether your device becomes a breakthrough or an expensive silicon coaster.
8. Optical and Photo-Driven Microactuators: Motion From Light
This is where the actuator conversation gets especially nerdy, and frankly, glorious. Some advanced concepts use light to generate photovoltage in piezoceramics or to trigger deformation in specialized microstructures. These optical or photo-driven actuator ideas are still niche, but they hint at a future where remote, wireless, or highly integrated actuation becomes more practical.
For now, optical microactuation remains more frontier than factory floor. Still, it belongs in the esoteric category because it shows just how far actuator research is willing to wander from the standard motor-and-linkage playbook.
How to Choose the Right Esoteric Actuator
Picking an actuator is less like shopping for a toaster and more like casting a movie. The “best” one depends on the role. A great choice for a soft gripper may be a terrible choice for a micro-optics stage.
Engineers typically compare actuators using these questions:
- How much stroke is required? Piezo and magnetostrictive systems usually offer small motion; soft and pneumatic systems offer much more.
- How much force is needed? Small-stroke actuators can still deliver very high force if the design is right.
- How fast must it respond? Piezo and magnetostrictive devices can be very fast; thermal systems are usually slower.
- How soft or rigid should the interaction be? EAPs, HASEL systems, and soft fluidic actuators shine in compliant applications.
- What is the operating environment? MRI, aerospace, precision optics, and consumer electronics all punish different weaknesses.
- How ugly is the control problem? Hysteresis, nonlinearities, voltage requirements, and thermal drift can all complicate integration.
- Can it be manufactured economically? The coolest actuator in the lab is still unemployed if it cannot survive packaging, testing, and production.
Real-World Applications of Esoteric Actuators
These actuators are not just academic party tricks. Piezo systems are widely used in precision positioning, optics, and biomedical devices. Shape memory alloys are used in deployable and adaptive aerospace mechanisms. EAPs and soft actuators are pushing forward haptics, wearables, and gentle robotic handling. MEMS actuators are everywhere from electronics to medical systems. Magnetostrictive devices remain valuable in specialized high-load, high-speed applications. Flexible piezo composites and soft robotic muscles are opening new possibilities for vibration control, motion shaping, and safer machine-human interaction.
In short, esoteric actuators thrive wherever the motion problem is too demanding, too small, too soft, too precise, or too weird for ordinary machinery.
The Biggest Challenges Holding Them Back
If esoteric actuators are so clever, why are they not taking over everything? Because engineering is rude and reality has invoices.
The biggest barriers include:
- Nonlinear behavior, including hysteresis and creep
- Thermal lag in shape memory and electrothermal systems
- High-voltage requirements for many polymer and electrostatic concepts
- Material fatigue and reliability under repeated cycling
- Packaging complexity, especially for micro-scale and soft systems
- Driver electronics and control difficulty
- Cost and manufacturability for real-world scaling
That said, the direction of travel is obvious. Modern actuator research is moving toward hybrid systems, integrated sensing, smarter control, better materials, and designs that combine the strengths of multiple actuation methods instead of betting everything on one.
The Future of Esoteric Actuators
The future is not likely to be “all soft” or “all smart material.” It will be mixed. Engineers are increasingly combining rigid structures, compliant elements, field-responsive materials, embedded sensors, and software-heavy control. A robot hand might use a motor for gross motion, soft actuators for safe contact, and piezo elements for fine adjustment. A spacecraft component might rely on lightweight shape memory hardware for deployment and piezo systems for precision tuning. A wearable device might use polymer-based artificial muscles supported by conventional electronics and feedback loops.
In other words, esoteric actuators are not replacing engineering fundamentals. They are expanding the vocabulary of motion. And that is a big deal, because every new actuator class gives designers another way to solve problems that used to be stuck between “too heavy,” “too fragile,” and “nice idea, but physics said no.”
Experiences Related to Esoteric Actuators
In real engineering environments, the experience of working with esoteric actuators is usually a mix of fascination, humility, and the occasional urge to stare at a test rig as if it has personally betrayed you. On paper, these devices often look glorious. The charts sparkle. The material properties sound heroic. The application sketches make everything look clean, elegant, and futuristic. Then the prototype arrives, and reality joins the conversation.
Teams working with piezoelectric actuators often describe the first successful demonstration as oddly magical. A tiny ceramic element moves a stage with astonishing precision, and suddenly the room gets very quiet because everyone realizes a barely visible motion has solved a very visible problem. Then the second phase begins: dealing with hysteresis, drift, preload, mounting details, and the fact that a beautiful actuator can become a mediocre system if the surrounding mechanics are careless. The lesson is clear: with piezo, the actuator is only half the story. The structure around it matters just as much.
Experiences with shape memory alloy actuators tend to be even more emotional. The first time a wire or tube changes shape and produces useful motion, it feels like engineering wizardry. Metal is not supposed to “remember” anything, yet there it is, recovering shape and doing work. But engineers quickly learn that thermal actuation comes with timing issues, cooling delays, and repeatability questions. In lab discussions, SMA systems are often admired for elegance and then immediately interrogated for control stability, cycling life, and speed. They are inspiring because they simplify mechanics, but they also force teams to think deeply about heat as part of motion design.
Soft actuators create a different kind of experience. When a soft gripper gently wraps around an object that would be difficult for a rigid mechanism, people tend to smile. It feels less like a machine forcing action and more like a material adapting to the world. That is the charm of soft robotics. But the practical side arrives quickly: leaks, tubing clutter, pressure regulation, inconsistent material batches, and the unavoidable question of how to package the whole system so it does not look like an octopus had a disagreement with a hardware store. Even so, many engineers stay loyal to soft systems because the safety and adaptability are hard to ignore.
HASEL and other electrohydraulic concepts add another memorable layer. The motion can be strikingly lifelike, and the idea of a soft electrically driven artificial muscle is hard to resist. Yet these experiences often come with careful discussions about high voltage, dielectric materials, durability, and manufacturing repeatability. The excitement is real, but so is the discipline required to turn a compelling research demo into dependable hardware.
MEMS actuators, meanwhile, teach a humbling lesson in scale. At the micro level, tiny fabrication imperfections can have enormous consequences. A design that seems straightforward in simulation can become difficult because of stiction, packaging stress, thermal effects, or process variation. Engineers working in this area develop a special kind of patience. They learn that success is rarely just about having the right physics; it is about controlling an entire ecosystem of tiny variables that all want attention at once.
Across all these experiences, one pattern repeats: esoteric actuators reward respect. They are not gimmicks, and they are not plug-and-play magic parts. When matched to the right problem, they can outperform conventional solutions in ways that feel almost unfair. But they demand thoughtful integration, honest trade-off analysis, and a willingness to learn from prototypes that fail in extremely educational ways. That, in many ways, is what makes them so compelling. They are not just components. They are invitations to think more creatively about how motion can be made.
Conclusion
Esoteric actuators are where material science, precision engineering, robotics, and ambition all collide. They include piezoelectric systems that move with microscopic confidence, shape memory alloys that turn heat into elegant motion, electroactive polymers that imitate muscle, soft fluidic designs that handle the world with care, magnetostrictive devices that respond with lightning-fast authority, and MEMS actuators that bring motion into the microscopic realm.
None of them is perfect. That is the point. Each solves a specific class of motion problems better than conventional hardware can. For modern designers, that makes esoteric actuators less of a curiosity and more of a competitive advantage. When the job calls for precision, compliance, lightweight integration, tiny scale, unusual environments, or motion that feels almost biological, the weird stuff stops looking weird and starts looking smart.